Управление роботами-манипуляторами лесных машин
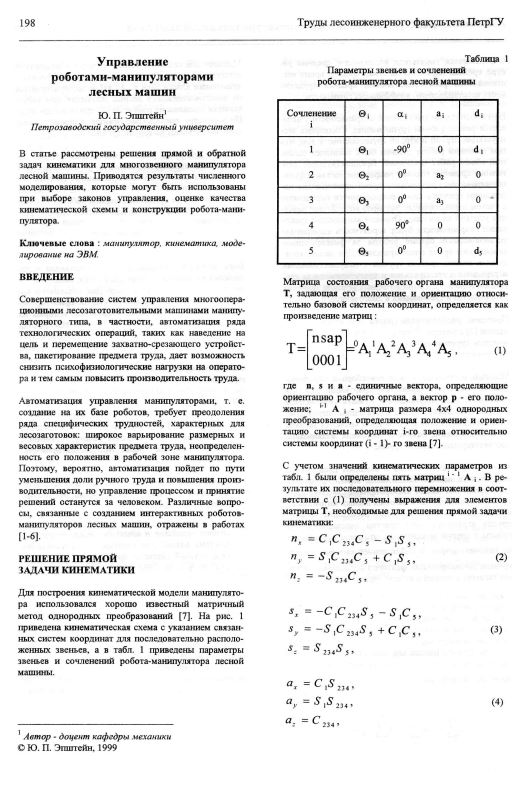
В статье рассмотрены решения прямой и обратной задач кинематики для многозвенного манипулятора лесной машины. Приводятся результаты численного моделирования, которые могут быть использованы при выборе законов управления, оценке качества кинематической схемы и конструкции робота-манипулятора.
Сборник
Все статьи сборника:
Куваев Владимир Иванович
Оптимизация работы автогрейдеров на содержании лесных дорогКочанов Анатолий Николаевич
К вопросу учета динамического действия подвижной нагрузкиГаврилова Ольга Ивановна, Редько Георгий Иванович
Биоэкологические основы выращивания сеянцев ели в условиях южной КарелииГерманов Анатолий Александрович, Нижник Петр Петрович
Обоснование к выбору способа дробления негабаритов гравийно-песчаных карьеров ЛПХГершеев Андрей Сергеевич
Оптимизация системы рубок ухода на основе ГИС-технологийДанилова Марина Владимировна
Оценка напряженно-деформированного состояния корпуса сушильного цилиндра бумагоделательной машиныКондратьев Юрий Николаевич
Расчет максимального выхода заготовок при раскрое плитных и листовых древесных материаловПитухин Александр Васильевич, Шиловский Вениамин Николаевич, Серебрянский Николай Иванович
Обработка результатов ресурсных испытаний при малом числе объектовГерасимов Юрий Юрьевич, Кильпеляйнен Сергей Адольфович, Давыдков Геннадий Анатольевич, Костюкевич Вадим Михайлович
Географическая информационная база данных по особо охраняемым территориям КарелииКуликов Михаил Иванович, Попов Ю. А.
Техника, рубки ухода и прирост лесных насажденийМарков Владимир Иванович, Ломов Алексей Юрьевич
К вопросу измельчения лесосечных отходовОвчинников Михаил Михайлович, Боброва Н. П., Соловьев Б. Ю.
Определение сил, действующих на крупногабаритную сплоточную единицу при ее свободном движении в потоке на закругленном участке рекиНижник Петр Петрович
Эффективные оценки статистических параметров контроля и управления продольной и поперечной разнотолщинностью бумажного полотнаМаркианов Владимир Алексеевич, Кондрашин Дмитрий Сергеевич, Зданович А. Ю.
Определение приборной точности персонального GPS приемникаАлане Х., Сюнёв Владимир Сергеевич
Машинизация заготовки леса в Финляндии (состояние и перспективы)Васильев Сергей Борисович, Кузьмин Л. Е.
Выход шпона из березовых чураковМазуркевич Михаил Алексеевич
Расчет оптимальной стратегии ремонта при неизвестном распределении функции случайного аргументаНестеров Лев Александрович
Проектирование системы управления сортировкой лесоматериаловКузьмин Александр Владимирович, Кузьмина Л. И., Ольхина Елена Сергеевна, Ольхин Юрий Васильевич
Организация и развитие коллекционных фондов на основе СУБД AccessКлепиков Игорь Владимирович
Контроль геометрии подъездных железнодорожных путей лесозаготовительных предприятий при помощи электронных тахеометровПосыпанов Сергей Валентинович
Имитационное моделирование процесса обслуживания плотов, поступающих в пункт приплаваДьячков Владимир Александрович, Любов Виктор Константинович
Экспериментальная установка для изучения процессов термо-пневморазрушения топливных частицКазачков Олег Владимирович
Способ выращивания усталостных трещин в ударных образцахКрупышев Павел Васильевич
Сезонное развитие и продуктивность валерианы лекарственной в КарелииМарков Владимир Иванович, Фролова Антонина Алексеевна, Шашкина Раиса Степановна
Анализ себестоимости обезличенного кубометра круглых лесоматериаловМильченко Иван Васильевич
Влияние прокладок на подвижность рамных пил в пильной рамкеКуколев Максим Игоревич, Кукелев Юрий Константиновиич, Луценко Л. А.
Аналитические формулы для проектирования теплоаккумулирующих системКуликов Михаил Иванович, Лысоченко Александр Алексеевич
Влияние длины опорной поверхности гусениц на проходимость лесной машиныМеньшиков Владимир Николаевич, Цыгарова Марина Валентиновна
Моделирование транспортно-технологического процесса освоения лесосек со слабыми несущими способностями грунтовНовиков Валерий Александрович
Экспериментальная проверка и получение регрессионных зависимостей глубины проникновения пропиточной жидкости от влияющих на процесс факторовПитухин Александр Васильевич, Бездворных С. А., Кликачев Ю. А.
Экспертная система проектирования валов бумагоделательных машин «ESSCAD»Германов Анатолий Александрович
Совершенствование технологии разработки сезонно-мерзлых моренных грунтов буровзрывным способомВасильев Сергей Борисович, Толпыго В. А.
Промышленные испытания дезинтегратора ДЗН-04Маркианов Владимир Алексеевич
Количественные оценки сочетания автомобильной дороги с рельефомРяхин Виктор Александрович, Харитонова О. А.
Опыт рубок переформирования лиственно-еловых насаждений Тверской областиЦыпук Александр Максимович
Обоснование размеров области напряжений в почве под действием механической нагрузкиШегельман Илья Романович, Одлис Давид Борисович
Методические предпосылки к организации лизинга тракторов и машин АО «Онежский тракторный завод»Сюнёв Владимир Сергеевич, Герасимов Юрий Юрьевич, Костюкевич Вадим Михайлович
Компьютерная информационная система «ФОРВАРДЕРЫ»Родионов Андрей Викторович
Актуальные вопросы исследования лесных технологийСтарченко Ольга Петровна, Денисова М. А.
Обоснование варианта организации производства пиломатериалов с точки зрения окупаемости капитальных вложенийСамородов Александр Викторович
К расчету теплообмена излучением круглоребристых труб и пучковЦарёв Анатолий Петрович
Problems of Forest Tree Species Breeding in RussiaРяхин Виктор Александрович, Ананьев Владимир Александрович
Лесоводственная оценка естественного возобновления и формирование насаждений на сплошных вырубкахШиловский Вениамин Николаевич
Выбраковка подверженных износу деталей трансмиссии тракторов ОТЗ при текущем ремонтеШубин Андрей Аркадьевич, Кулагин Сергей Юрьевич
О создании системы обеспечения качества в АО «Петрозаводскмаш»Эгипти Анатолий Эвальдович
Машины и механизмы для механизации лесохозяйственных работ: критерии оценки, качественные показателиЦарев И. А.
Концентрация тяжелых металлов в снежном покрове и реакция лесных насаждений на эмиссииЭпштейн Юрий Петрович
Управление роботами-манипуляторами лесных машинСавин Игорь Константинович
Новый взгляд на теплообмен при конденсации в электрическом полеСоколов Александр Иванович, Ботников А. В.
Тракторный лубрикатор для лесных питомниковШегельман Илья Романович
Обоснование рациональной технологии подготовки свежей пнево-корневой древесины к переработке на щепуСоколов Антон Павлович, Давыдков Геннадий Анатольевич
Информационная система «Техническое оснащение предприятий Госкомлеса РК»Яковлев Павел Григорьевич
Определение числа сателлитов и порядка их установки в планетарных механизмах из условия собираемостиЭгипти Анатолий Эвальдович, Серебрянский Николай Иванович
Подбор номенклатуры показателей надежности лесохозяйственных машин на стадии проектированияСоколов Антон Павлович
Аспекты автоматизации принятия решений на предприятиях лесного хозяйства